
Servo Motor Arduino Wiring Schematics and Source Code
For the more current Arduino and Robotio Nano diagrams and information check out our Robot Servo Controllers page.

Robotio & Arduino Nano, UNO Servo Pins = 2 -> 13
SERVO MOTOR WIRE COLOR CODE
BROWN = GND
ORANGE = Servo Pwr
YELLOW = SIGNAL
BREADBOARD
(4) AAA BATTERY PACK = Typ Servo Rated up to 6 Volts on motor power pin
USB PORT
CONNECTED TO PC
SG90 SERVO MOTORS
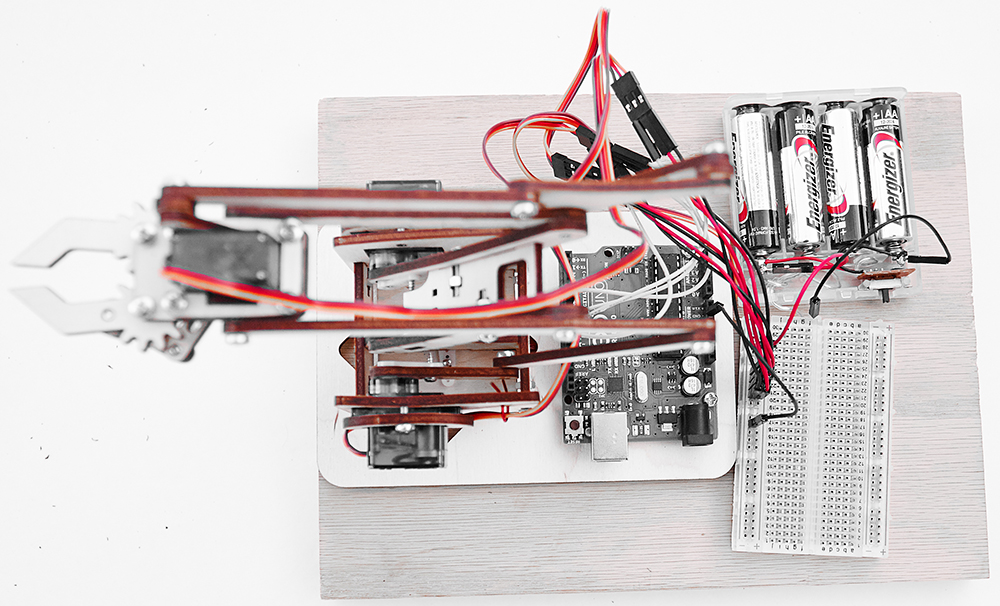
ArmUno, Armio, MeArm Basic Arduino Servo Wire Connections using a Breadboard and Jumper Wires
The above wiring diagram shows the pin-out on a Arduino UNO micro-controller board needed to let the sample source code control the robotic arm and communicate with a windows PC running MeCon motion control software. using a standard electronic prototyping breadboard and some jumper wires makes this an easy and fast task. the photo below shows this circuit all wired up.
USB PORT
CONNECTED TO PC
Image of a MeArm with an Arduino UNO with Servo Motors all Wired up
Arduino IDE Software
We will need to have the Arduino IDE software installed on our PC and have the micro controllers USB port connected to a USB port on the computer via a cable in order to transfer the the sample code to the Arduino. if you don't already have the Arduino software you can download it. Below we have the Arduino source code. You can copy and paste this into the Arduino IDE and save it with a meaningful name. Hit the upload arrow button to transfer to the micro controller.
Basic Arduino Code for MeCon Servo Motor Robot Motion Control Software
// Minimal Code Example for Robotic Servo Control with Robotio & Arduino Uno & Nano Boards
//Use With MeCon.exe Windows Software for Robotic Arm Motion Control, ArmUno, Armio, MeArm, Etc..
#include <Servo.h>
//MeArm HAS 4 SERVOS
Servo xServo; // create servo object, arm base servo - left right motion
Servo yServo; // create servo object, left side servo - forward backwards motion
Servo zServo; // create servo object, right side servo - forward backwards motion
Servo clawServo; // create servo object, end of arm servo - open,close the claw hand
//servo positions values, expects 1-180 deg.
int xPos;
int yPos;
int zPos;
int clawPos;
//*************** INIT AT STARTUP *******************************************************************
void setup() { // the setup function runs once when you press reset or power the board
// assign servo to signal pin numbers, Use any pins# 2 threw 13
xServo.attach(11); // attaches the servo on pin 11 to the servo object
yServo.attach(10); // attaches the servo on pin 10 to the servo object
zServo.attach(9); // attaches the servo on pin 9 to the servo object
clawServo.attach(6); // attaches the servo on pin 6 to the servo object
// initialize serial port, Make sure is the same in your control Software/Hardware
Serial.begin(9600);
// Debug only send serial message to host com port terminal window in Arduino IDE
Serial.print("*** MeCom Test ***."); // Boot Message, debug connection test
}
// ******************************************************************************************************
// ********************************** MAIN PROGRAM LOOP START *******************************************
// ******************************************************************************************************
void loop() {
//serial in packet patern = xVal,yVal,zVal,clawVal + end of packet char 'x'
while (Serial.available() > 0) {
xPos = Serial.parseInt();
yPos = Serial.parseInt();
zPos = Serial.parseInt();
clawPos = Serial.parseInt();
if (Serial.read() == 'x') { // Detect end of packet char 'x', go ahead and update servo positions
// UPDATE SERVO POSITIONS
xServo.write(xPos);
yServo.write(yPos);
zServo.write(zPos);
clawServo.write(clawPos);
}
}
}
SHOW ME YOUR MOVES! - MeCon ArmUno and MeArm Motion Control Software

Your desktop robotic arm should now be all setup and ready to accept movement commands from the MeCon motion control program. Please see our page dedicated to MeCon operation.

Copyright © MICROBOTLABS

Our Make & Learn Brands: MICROBOTLABS™ ARM.UNO™ ROBOTIO™ PROTIO™ ARMIO™ ANITRON™ ANITRONIC™ ARM.ONE™